
En la siguiente entrada
vamos a proceder a realizar una breve introducción acerca de los circuitos
secuenciales.
Los circuitos secuenciales
se caracterizan porque las variables de salida, en un determinado instante,
dependen de las variables de entrada en ese mismo instante y de la historia del
circuito (los estados anteriores por los que haya pasado).
Son, por tanto, sistemas
capaces de memorizar cierta información de lo sucedido con anterioridad a un determinado
momento (historia pasada por el circuito), y utilizar esta información
conjuntamente con una combinación lógica de sus entradas de datos para
determinar el futuro estado del sistema.
Muchos de los sistemas
digitales prácticos se realizan siguiendo la filosofía de los circuitos
secuenciales (circuitos de control, sistemas de alarma y seguridad, relojes,
etc.).
La estructura general de
un circuito secuencial responde al diagrama de bloques del modelo Huffman:
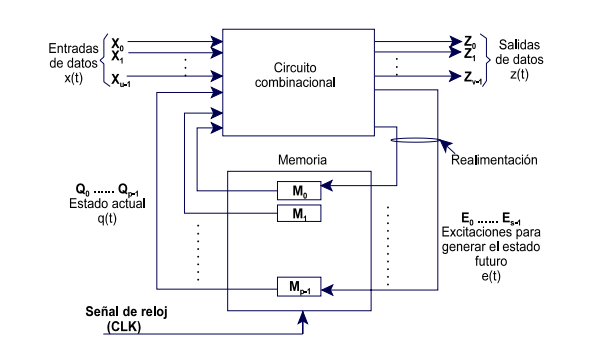 |
| Modelo Huffman |
Los sistemas secuenciales
se pueden clasificar en dos grandes bloques: síncronos y asíncronos.
Esta clasificación se hace
atendiendo a los tipos de elementos de memoria utilizados. La diferencia entre
los sistemas secuenciales síncronos y asíncronos está en que en los primeros
los cambios de estado son controlados por una señal de referencia común (señal
de reloj) y los segundos no.
En un circuito secuencial
asíncrono ante un cambio en las señales de entrada de datos, las salidas alcanzarán
sus niveles definitivos, transcurrido un tiempo que será función de los tiempos
de propagación del circuito combinacional y de los elementos de memoria (en
realidad las salidas de datos se estabilizarán cuando se estabilicen las
salidas de los elementos de memoria).
Tiempos estos que pueden
variar entre un valor mínimo y un máximo, y que por tanto introducen un cierto grado
de incertidumbre en los tiempos que tardan en propagarse los cambios de las
variables de entrada a sus salidas. Hay que advertir que pueden existir
situaciones en las que no se alcance la estabilidad (estados metaestables).
Según esto, en los circuitos
secuenciales asíncronos después de producirse un cambio en las entradas hay que
esperar un tiempo hasta que se estabilicen los valores de las salidas y sólo
después de que se alcance esta estabilización se podrá realizar otro cambio en
sus entradas, ya que en caso contrario no se verán reflejados en las salidas
estos cambios. Evidentemente, el tiempo mínimo entre dos cambios consecutivos
en las entradas de datos es función de los tiempos de propagación del circuito
combinacional y elementos de memoria.
El gran inconveniente de
los circuitos asíncronos es que la incertidumbre de los tiempos de propagación
se traduce en incertidumbres en el cambio de las señales de salida.
Los circuitos síncronos lo
que hacen es eliminar esta incertidumbre utilizando una señal de sincronismo o señal
de reloj. La señal de reloj lo que hace es permitir que los cambios en las
entradas y en los estados internos tengan efecto sobre el resto del sistema
sólo en instantes discretos de tiempo.
Estos instantes discretos
suelen coincidir con los flancos de subida o bajada de la señal de reloj. Así,
la salida que adopten los elementos de memoria, después de un flanco de reloj
(CLK), será función únicamente de los valores que tenían sus entradas en el
instante anterior al flanco de CLK.
Actualmente existe un auge
e interés por el diseño de circuitos VLSI asíncronos o autotemporizados, ya que
el aumento de velocidad de operación y la complejidad de los circuitos
digitales conllevan grandes problemas para conseguir que las señales de reloj
que se propaguen por caminos diferentes tengan idénticos tiempos de
propagación. Esto hace que la distribución de la señal de reloj dentro de los
circuitos digitales sea una tarea compleja, siendo una de las razones de esta
complejidad los retrasos en la señal de reloj (lo que se conoce como clock
skew), además de los problemas de interferencias que puede sufrir la
señal de reloj (cross-talk).
Representación de los automatas.
Las dos realizaciones
básicas de los autómatas finitos son las máquinas de Mealy y de Moore,
que a su vez, pueden ser síncronas o asíncronas.
Para representar el
comportamiento de los circuitos secuenciales se utilizan:
Tablas de
estados o tablas de transición (en un formato similar a las tablas de verdad).
Grafos (también
conocidos como diagramas de estados), donde aparecen los diferentes
estados (que son finitos) y las funciones de transición de las salidas para
cada combinación de las entradas (que también son finitas).
Estas tablas y grafos
difieren dependiendo de si se trata de un autómata o máquina de Mealy o
de Moore.
Toda máquina
mealy se puede transformar en una máquina Moore y viceversa
Automata de Mealy.
En una máquina Mealy,
las salidas pueden cambiar si cambian las entradas y ello sin necesidad de que
se produzca un pulso en el bloque de registros.
En este tipo de
representación los estados se muestran dentro de círculos. La transición entre
estados se indica con arcos que conectan dos estados y sobre estos arcos se
indica la entrada que provoca la transición y la salida para esa entrada y el
estado actual.
 |
| Diagrama de flujo. |
Automata de Moore.
La máquina Moore es
un caso particular de máquina Mealy, en la que las salidas
dependen exclusivamente del estado interno y no de las entradas.
Por ello, en una máquina Moore,
si alguna entrada cambia, las salidas no cambian al menos hasta que no aparezca
un pulso de reloj que origine un cambio en los estados internos (elementos de
memoria). Un ejemplo de máquina Moore lo constituye un contador.
Grafos (diagramas de
flujo)
En este tipo de
representación los estados y salidas actuales se muestran dentro de círculos.
La transición entre estados se indica con arcos que conectan dos estados y
sobre estos arcos se indica la entrada que provoca la transición.
No hay comentarios:
Publicar un comentario